
The problem of finding the optimal location to set up an industry when more than one location of raw materials was available was found by French mathematician Pierre Varignon (1654-1722).
This problem uses the concept of the centre of mass, designed here in the form of a device known as the Frame of Varignon.
To understand this, let us first understand the concept of the centre of mass.
In Physics, the centre of mass of a distribution of mass in space or of a system of masses is a point (also known as a balance point) where the entire mass of the system is supposed to be concentrated or in simple words, the object balances itself at that point.
Mathematical treatment:
The problem stated above is defined in a 2-D space, hence, to solve it the above stated definition can be reduced to two- dimensional vector space using only the
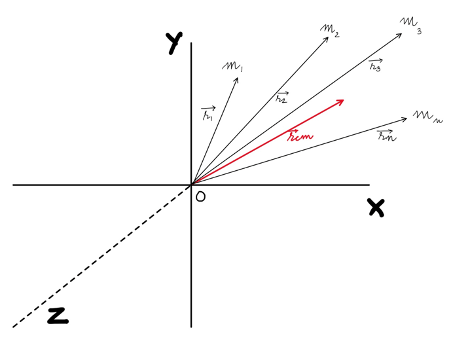
The implementation of the centre of mass system in the Frame of Varignon can be understood as:
Consider 4 masses distributed in 2-D space as shown, with
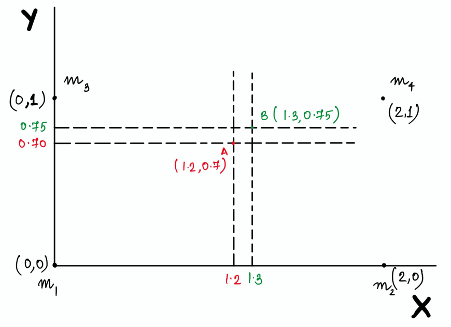
Now, let the mass
Hence, the industry must now be located at point B (shown in the figure) with coordinates (1.3, 0.75).
Clearly, from this calculation, it can be deduced that if the cost of transportation between one of the source locations to the industry is increased, then the optimal location of the industry shifts towards that source.